NVIDIA Isaac Lab
NVIDIA Isaac™ Lab is an open-source, unified framework for robot learning designed to help train robot policies.
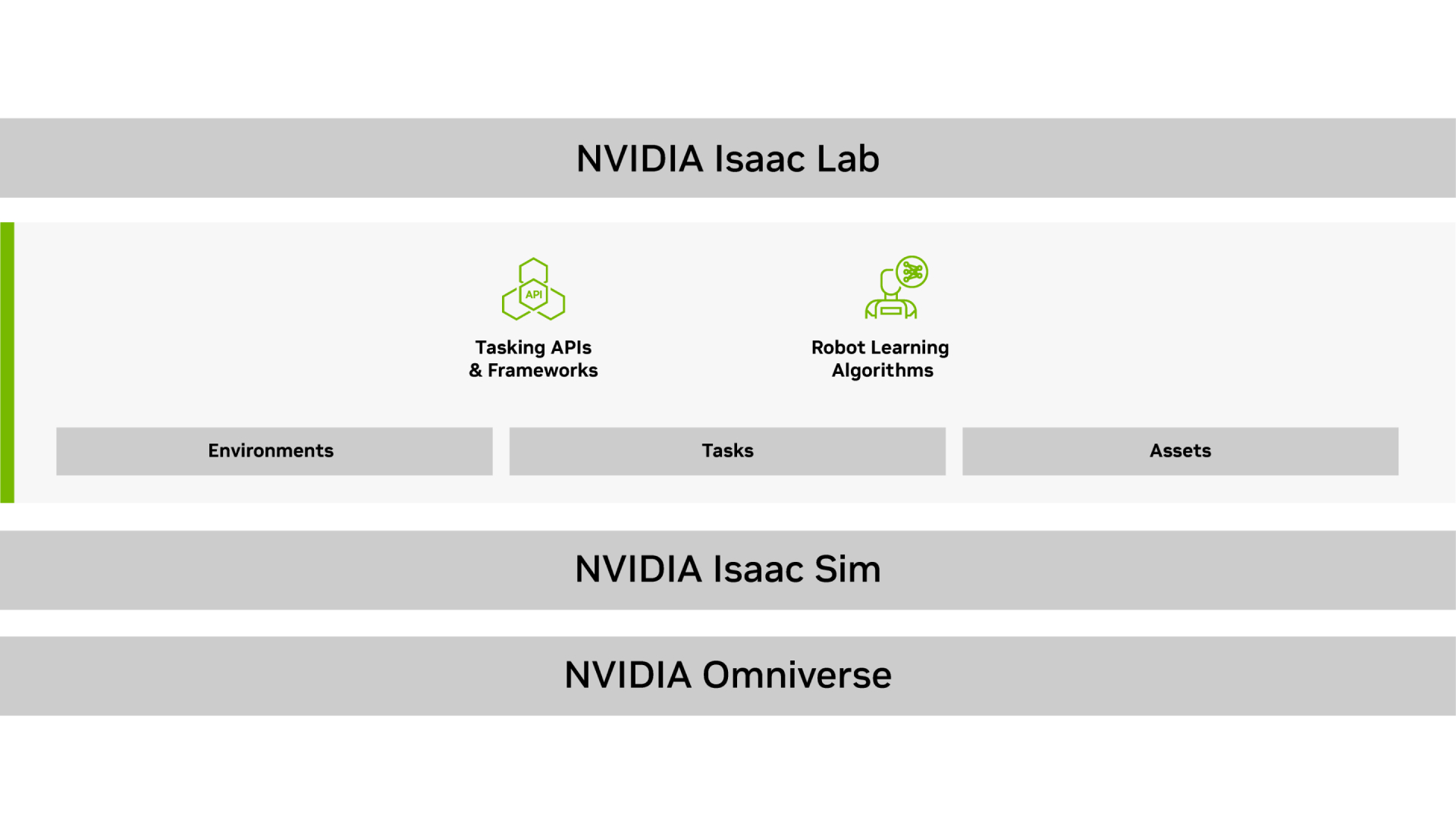
It’s built on NVIDIA Isaac Sim™, delivering high-fidelity physics simulation using NVIDIA PhysX® and physically based rendering with NVIDIA RTX™. This bridges the gap between high-fidelity simulation and perception-based robot training, helping developers and researchers build more robots, more efficiently.
Built on Isaac Lab, Isaac Lab-Arena is an open-source framework for scalable policy evaluation in simulation that gives you streamlined APIs to simplify task curation and diversification.
How Isaac Lab Works
Isaac Lab’s modular architecture and NVIDIA GPU-based parallelization make it ideal for building robot policies that cover a wide range of embodiments, including humanoid robots, manipulators, and autonomous mobile robots (AMRs).
This gives you a comprehensive framework for robot learning, covering everything from environment setup to policy training. It supports both imitation and reinforcement learning methods. Plus, you can further customize and extend its capabilities with a variety of physics engines, such as PhysX, NVIDIA Warp, and MuJoCo.
Isaac Lab is also the foundational robot learning framework of the NVIDIA Isaac GR00T platform.
Introductory Resources
A Simulation Framework for Multi-Modal Robot Learning
See how Isaac Lab’s combination of advanced simulation capabilities and data-center scale execution will help unlock breakthroughs in robotics research.
NVIDIA Isaac Lab-Arena
Built on Isaac Lab, Isaac Lab-Arena is an open-source framework for scalable policy evaluation in simulation.
Isaac Lab Courses
Explore the fundamentals of robot learning and Isaac Lab, a powerful tool for developing robotic applications.
Isaac Lab Office Hours
Stay informed with our recurring office hours that cover in-depth topics with experts answering questions about Isaac Lab.
Key Features
Flexible Robot Learning
Customize workflows with robot training environments, tasks, learning techniques, and the ability to integrate custom libraries (e.g., skrl, RLLib, rl_games, and more).
Reduced Sim-to-Real Gap
The GPU-accelerated PhysX version provides accurate, high-fidelity physics simulations. This include support for deformables that allows for more realistic modeling of robot interactions with the environment.
Unified Representation
Discover easy customization and addition of new environments, robots, and sensors with OpenUSD through Isaac Lab’s modular design.
Get Started With Isaac Lab
Download
Get started with the latest version of Isaac Lab by following the installation guides on GitHub.

Tutorials
Access the step-by-step guide to help understand and use various features of the framework.
Start Your Learning Path
Explore advanced concepts in robot learning, gain practical skills, and learn how you can streamline your development processes with Isaac Lab.
Newton, the Next-Generation Open-Source Physics Simulation Engine
Newton is an open-source, GPU-accelerated, and extensible physics engine, co-developed by Google DeepMind and Disney Research, and managed by the Linux Foundation. Built on NVIDIA Warp and OpenUSD, Newton is optimized for robotics and compatible with learning frameworks such as MuJoCo Playground or Isaac Lab. Newton Beta is now available to use.
Get Started on Newton
Starter Kits
View more tutorials and how-to guides in the documentation.
Accelerate Robot Learning
Choose from reinforcement learning and imitation learning to train AI robots. Easily bring your custom libraries and use the direct agent-environment or hierarchical-manager development workflows.
Enable Perception in the Loop
Tiled rendering reduces rendering time by consolidating input from multiple cameras into a single large image. With a streamlined API for handling vision data, the rendered output directly serves as observational data for simulation learning.
Scale With Multi-GPU and Multi-Node Training
Scale up training of cross-embodied models for complex reinforcement learning environments across multiple GPUs and nodes. Deploy locally and on the cloud (AWS, GCP, Azure, and Alibaba Cloud) by integrating with NVIDIA OSMO.
Accurate High-Fidelity Physics Simulation and Rendering in Omniverse
Tap into the latest GPU-accelerated PhysX version through Isaac Lab, including support for deformables, ensuring quick and accurate physics simulations augmented by domain randomizations.

RTX PRO Server—the Best Platform for Industrial and Physical AI
NVIDIA RTX PRO Server accelerates every industrial digitalization, robot simulation, and synthetic data generation workload.
Learn MoreIsaac Lab Learning Library
Streamline Robot Learning with Whole-Body Control and Enhanced Teleoperation in NVIDIA Isaac Lab 2.3
NVIDIA Isaac Lab
The latest version of Isaac Lab 2.3, in early developer preview, improves humanoid robot capabilities with advanced whole-body control, enhanced imitation learning, and better locomotion.
Quadruped Robot Locomotion and Multiphysics Simulation Using Newton in NVIDIA Isaac Lab
NVIDIA Isaac Lab
Walks through how to train a quadruped robot to move from one point to another and how to set up a multiphysics simulation with an industrial manipulator to fold clothes. This tutorial uses Newton within NVIDIA Isaac Lab.
Ecosystem
Our industry partners and collaborators are integrating NVIDIA Isaac Lab and accelerated computing into their platforms and solutions.
More Resources

Latest Isaac Lab News
Get started with NVIDIA Isaac Lab today.
FAQs
The Isaac Lab framework is open-sourced under the BSD-3-Clause license.
Isaac Sim is a comprehensive robotics simulation platform built on NVIDIA Omniverse™ that provides high-fidelity simulation with advanced physics and photorealistic rendering. It focuses on synthetic data generation (SDG) and testing and validation (SIL/HIL), and is a reference template for custom robotics simulators.
In contrast, Isaac Lab is a lightweight, open-source framework built on top of Isaac Sim, specifically optimized for robot learning workflows and designed to simplify common tasks in robotics research like reinforcement learning, imitation learning, and motion planning.
If you’re an existing NVIDIA Isaac Gym (predecessor of Isaac Lab) user, we recommend migrating to Isaac Lab to ensure you have access to the latest advancements in robot learning and a powerful development environment to accelerate your robot training efforts. Check out the migration guide from Isaac Gym environments to Isaac Lab.
Yes, Isaac Lab and MuJoCo are complementary. MuJoCo's ease of use and lightweight design allow for rapid prototyping and deployment of policies and Isaac Lab can complement it when you want to create more complex scenes, scaling massively parallel environments with GPUs and high-fidelity sensor simulations with RTX rendering. NVIDIA and MuJoCo are actively exploring advancing technical collaborations, stay tuned for future announcements.